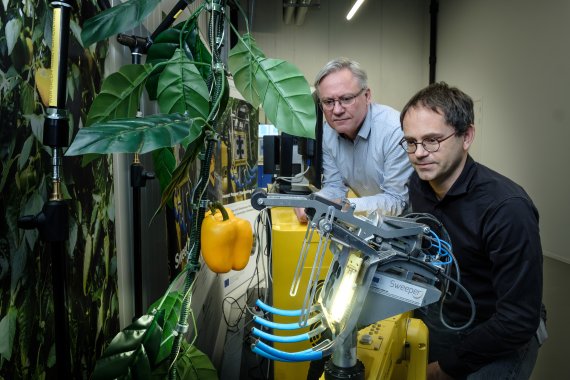
Jos Balendonck (links) en Jochen Hemming bij ‘hun’ Sweeper. tekst Roelof Kleis foto’s Sweeper EU en Guy Ackermans
Sweeper is de jongste plukrobot uit de Wageningse agrorobotica. Hij staat in Phenomea, de demo-ruimte naast Axis. In stilstand is het maar een log ogend apparaat. Feitelijk een grote, smalle, gele machinekamer met op de bok een robotarm. Maar wacht tot-ie tot leven komt. Het best zie je dat in de promofilm die is gemaakt in de kas van paprikateler De Tuindershoek in IJsselmuiden. Het filmpje op YouTube en sweeper-robot.eu is dé blockbuster van de Plant Sciences Group, zegt Jochen Hemming van Wageningen Plant Research (Glastuinbouw). Al meer dan 25 duizend views in een paar maanden tijd.
Wat je ziet in het filmpje is dit: robot Sweeper rijdt tussen de rijen paprika’s door, stopt bij een paprika, scant de hele omgeving, benadert de groente van de juiste kant, snijdt de steel door, vangt de paprika op in zijn hand en legt die weg in een krat. Hij doet daar gemiddeld 24 seconden over. Dat is een wereldprestatie. Tenminste, als je dat vergelijkt met zijn voorganger Crops. Deze paprikaplukrobot van de eerste generatie, ook een WUR-creatie, deed er drie jaar geleden anderhalve minuut over om een paprika in het krat te krijgen. Daar haal je geen oogst mee binnen.
6 seconden
Dat geldt overigens ook voor Sweeper, een project van WUR met Zweedse, Israëlische en Belgische collega’s. De robot is weliswaar vier keer sneller dan zijn voorganger, maar legt het nog ruim af tegen de mens. Wij plukken een paprika in ongeveer 6 seconden. Bovendien plukken wij alles, dus ook de paprika’s die niet zo voor het grijpen hangen. Dat kan Sweeper nog niet.
‘De robot ziet maar een deel van wat er is’, legt Hemming uit. ‘Clusters van paprika’s onderscheidt hij niet. Soms zitten bladeren in de weg. En paprika’s aan de binnenkant van de plant zijn slecht bereikbaar. Feitelijk kan hij alleen paprika’s oogsten die aan de buitenkant hangen.’ Sweeper komt daarmee in een huidige commerciële kas tot een oogst van 55 procent van de rijpe paprika’s. Na ‘ontclustering’ en verwijdering van wat hinderlijk blad. Maar ook dat is al een hele verbetering: Crops zag maar een op de drie rijpe paprika’s.
Levensvatbaar
Toch denkt projectleider Jos Balendonck van Wageningen Plant Research (Glastuinbouw) dat er muziek zit in een commerciële toepassing. ‘De telers willen een robot die 100 procent scoort, omdat arbeid beperkt beschikbaar is. Met de Sweeper halen we dat bij de huidige teeltsystemen niet. Maar ik denk dat we ook een goede businesscase hebben met een robot die de helft oogst. De mens doet dan de andere helft. Zo’n optie kan levensvatbaar zijn. Mits de robot sneller wordt. Het liefst zo snel als een mens. Alle stapjes in het proces moeten nog sneller. Ik denk dat dat binnen drie tot vijf jaar lukt. Dat willen we graag in een volgend project gaan doen.’
Op de langere termijn, over vijf tot tien jaar, moet er ook een robot te maken zijn die de hele oogst kan plukken, denkt Balendonck. Maar daarvoor is meer nodig dan een verbeterde Sweeper. ‘Dan zal ook het teeltsysteem anders moeten. De planten worden nu langs draden geteeld die in een V-vorm hangen. Een dubbele rij dus. De Sweeper kan niet bij de paprika’s aan de binnenkant. Je moet dus naar systemen met enkele rijen planten. Veredelaars kunnen bovendien rassen ontwikkelen die gunstiger zijn voor een plukrobot. Planten met minder clusters en minder hinderlijk blad.’
De sweeper aan het werk:
Grijper met ogen

Sweeper heeft een lange robotarm met daaraan een combinatie van een kop en een hand. In de kop zit zijn visuele systeem. Twee camera’s in het centrale oog maken een kleuren- en een dieptebeeld. Vier infraroodlampjes om het centrale oog zorgen voor het licht dat voor het dieptebeeld nodig is. Rijen felle ledlampjes langs de rand van de kop verzorgen een uniforme flitsbelichting voor het kleurenbeeld. De camera maakt op deze manier twintig beelden per seconde. De paprika wordt van verschillende kanten bekeken, zodat Sweeper een goed beeld krijgt van de omgeving. Dit detectiesysteem is ontwikkeld door Ruud Barth, die er onlangs cum laude op promoveerde. De kop/hand nadert de paprika vervolgens en een snel bewegend mesje snijdt de paprika af. De blauwe ‘vingers’ van Sweeper vangen de vrucht op en deponeren die in een krat. De robot is getest op gele paprika’s, maar andere kleuren zijn, mutatis mutandis, ook mogelijk.
FlexCRAFT: zelflerende robots
Robots zijn goed in steeds dezelfde dingen doen op dezelfde manier. Met variatie kunnen ze niet omgaan. Dat is volgens hoogleraar Eldert van Henten van Agrarische Bedrijfstechnologie een hindernis bij de ontwikkeling van robots in het agro-domein. De natuur kent immers veel variatie. Het nieuwe programma FlexCRAFT, een samenwerking van 4TU (waar WUR deel van uitmaakt), de Universiteit van Amsterdam en bedrijven, gaat dat probleem aanpakken. Doel is een manier te vinden om robots basisvaardigheden aan te leren, die ze kunnen gebruiken bij de uitvoering van nieuwe taken. Dat moet over vier jaar toepassingen opleveren, zoals een betere Sweeper die ook tomaten kan plukken. Of een robot die kipfilets of snoep verpakt. WUR leidt het project waar 4 miljoen euro mee is gemoeid. Van Henten kan er binnen zijn groep twee promovendi en twee postdocs mee aan het werk zetten.